



 受験生
受験生 在学生
在学生 卒業生
卒業生 保護者等
保護者等 地域・一般
地域・一般 企業・研究者
企業・研究者 教職員
教職員
2022年11月24日
- 受 賞
山本郁夫研究室・海の兄弟ROVが第8回沖縄海洋ロボットコンぺティションのROV部門で最優秀賞を受賞
長崎大学海洋未来イノベーション機構・工学研究科の山本郁夫教授研究室のROV(遠隔操作型の無人潜水機)のREMONAとROV☆STARの2台が、第8回沖縄海洋ロボットコンペティションに出場し、ROV部門(知能・計測チャレンジ/ノーマルタスクの2部門)でそれぞれ最優秀賞を受賞しました。
REMONA(図1)はROV部門知能・計測チャレンジ、ROV☆STAR(図2)はROV部門ノーマルタスクでそれぞれ学術発表と海洋競技の最高点(優勝)を得ました。REMONAはROV部門ノーマルタスクでも優秀賞も受賞しております。(2022年11月20日)
 REMONA(図1) REMONA(図1) |
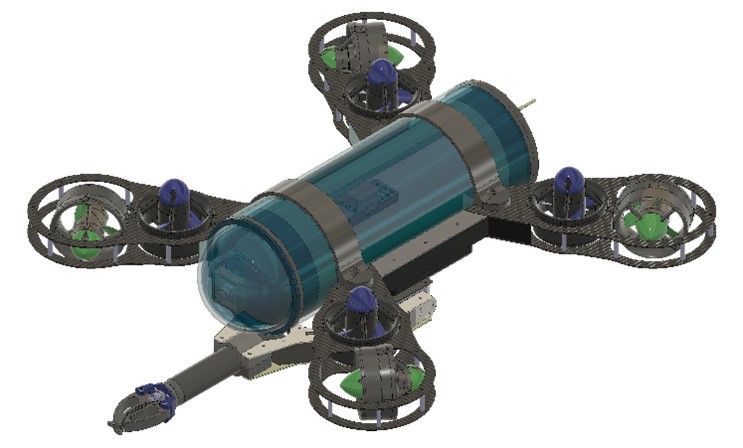 ROV☆STAR(図2) ROV☆STAR(図2) |
RENOMAはAI人工知能による構造物の傷の探知や海象外乱下での定点保持性と画像捕捉性に優れ、ROV☆STARはマルチコプターのようなスラスタ配置による高運動機動性と水中グリッパによる海底からのモノ回収作業性を特長としております。
なお、本コンペティションは国内外26チームの参加で行われ、AUV部門ノーマルタスクでは九州工業大学、フリースタイル部門では愛知工業大学が最優秀賞、他に東京工業大学が敢闘賞、韓国国民大学と広島工業大学が特別賞を受賞しております。
ROV : Remotely Operated Vehicleの略(遠隔操縦水中機)
AUV : Autonomous Underwater Vehicleの略(自律型無人水中機)
山本研究室開発メンバー:山本郁夫教授、工学研究科 盛永明啓 助教、大学院工学研究科機械工学コース(加藤祐也、乾雄貴、鐘ヶ江晃希)、大学院工学研究科海洋未来科学コース(大篠泰志、里園拓斗)、工学部機械工学コース4年(木本大晟、臺航太朗)、夢想科学株式会社 泉保則・泉優万
 |
